RESEARCH
Publications & Interests
> Selected Publications
Hierarchical Supervisory Motion Planning for Frontal Following Robots using Guided-MPPI & DVR
Ongoing Research
W.M.S.P. Rathnayake, Dr. B.G.D. Achintha, G.M.K.B. Karunasena, R.A. Kasun Kalhara Perera
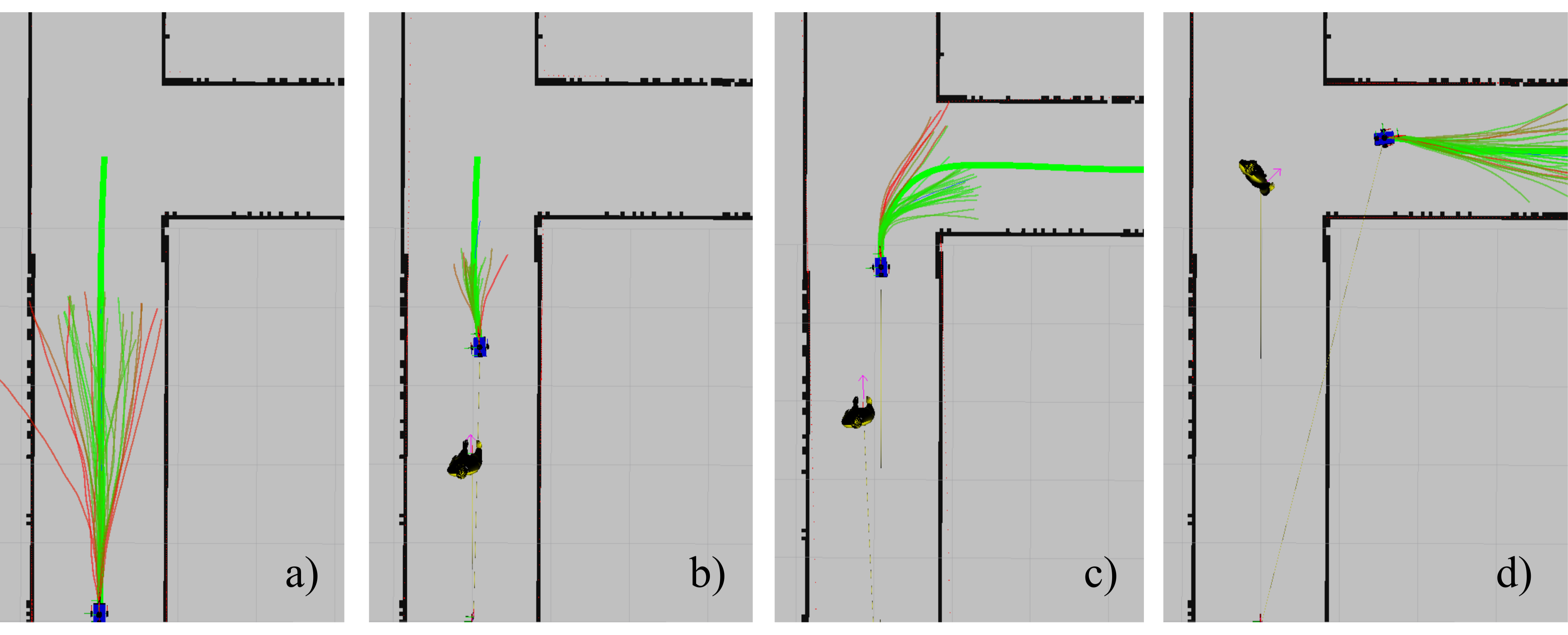
This research introduces a Hierarchical Supervisory Motion Planning (HSMP) framework on ROS 2 designed to resolve trajectory instability in Frontal Following (FiF) robots. The system decouples trajectory geometry from human kinematics using a Dynamic Virtual Rail (DVR) for stable corridor generation. The stack includes a Perception layer (LiDAR/RGB fusion), a Decision layer (DVR with Junction Latching), and a dual-controller Execution layer (KPC & Guided-MPPI). A critical innovation (Protected) is the Curvature-Preserving Velocity Filter, which prevents corner-cutting by optimizing paths at nominal speeds and scaling angular velocity to preserve geometric validity regardless of execution speed.
Enhancing Accuracy in Automated Solid Waste Segregation
Research Proposal
W. M. S. P. Rathnayake
This research investigates the potential for improving the accuracy and efficiency of automated solid waste segregation systems by integrating multiple sensors with a cross-verification mechanism. Current systems, which typically rely on single-method technologies, often fall short when handling the complexity and variability of non-organic waste streams, resulting in high contamination rates and reduced recycling efficiency. By developing and testing a multi-sensor approach, this study aims to achieve a high sorting accuracy in real-world conditions.
RESEARCH_INTERESTS
- + Autonomous Navigation in Unstructured Environments
- + Human-Robot Interaction & Social Navigation
- + Multi-Agent Systems & Swarm Robotics
- + Computer Vision for specialized domains (Underwater, Aerial)
- + Embedded Systems & Real-time Control
COLLABORATION
Open to research collaborations in robotics, machine vision, AI and embedded systems.
Contact Me